💰Spring Renewal & Women’s Day Promotion – 8% OFF Limited Time
🌸With the arrival of spring, our company has officially resumed full operation and production capacity after the Spring Festival holiday. We sincerely thank all customers for your patience and support.
To honor International Women’s Day and thank you for your trust, we are launching a limited-time special promotion:
⏰ Promotion Time March 5 – March 31
🎯 Exclusive Discount 8% OFF Coupon for all orders placed during the valid period.
💡 Warm Tips Place your order early to enjoy priority production and guaranteed delivery time.
This event is dedicated to celebrating the power of women worldwide and thanking you for your continued partnership.
For any inquiries, please contact our sales team.
Thank you for choosing us, and let’s move forward to a prosperous new year together!
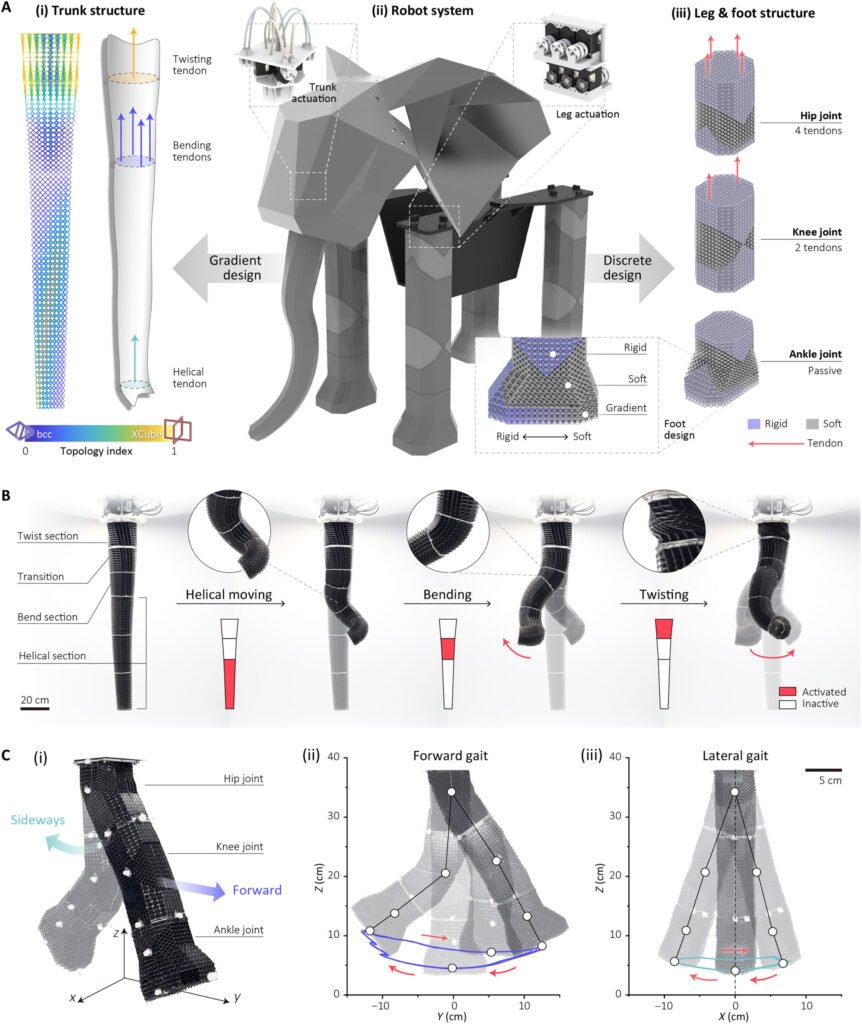
A new elephant-inspired robot can do some of the most surprising tasks, from gently plucking a flower with its trunk to powerfully kicking a bowling ball. It’s all thanks to a groundbreaking design approach inspired by the body of an elephant, which combines strong legs and a soft, flexible trunk, and uses only one type of 3D printed material. What makes this robot special is not what it’s made of, but how it’s designed.
The robot was created by Professor Josie Hughes and her team at the CREATE Lab, part of the Institute of Mechanical Engineering at the École Polytechnique Fédérale de Lausanne (EPFL) in Switzerland. The team also included postdoctoral researchers Qinghua Guan and Hung Hon Cheng, as well as PhD student Benhui Dai.
Instead of using different materials for soft and hard parts, the team found a way to shape the inside of a single material using special internal structures, or lattices. By changing the pattern of these lattices, they can make the material act soft in some areas and stiff in others. This lets them build lifelike machines that can move with strength and flexibility, just like real animals.
Lattices are like miniature building blocks or scaffolds inside a material. By changing the shape and pattern of these blocks, the researchers could control how stiff or soft each part of the robot would be. This new design method gives engineers more control over how a robot moves and feels, without needing different materials or complicated manufacturing.
Elephant robot demonstrates 3D printing technology. Image courtesy of EPFL.
In nature, animals move using muscles, tendons, and bones with different levels of stiffness. For example, an elephant’s trunk is soft and flexible, while its legs are strong and rigid. To replicate this in robotics without making systems overly complex or heavy, researchers developed two key techniques:
Topology Regulation (TR): This method gradually blends two lattice structures to create a smooth transition from soft to stiff materials.
Superposition Programming (SP): By stacking or rotating lattice patterns, this technique allows precise control over stiffness in specific directions.
Elephant robot pinches a flower with its robotic trunk. Image courtesy of EPFL.
Using these techniques, the team created a robotic elephant with a soft, flexible trunk and strong legs. The trunk is divided into three sections—twisting, bending, and rotating—and operates with only four motors and a few tendons. TR enables the trunk to gently grip objects like a flower without damaging them.
The legs use SP to form strong joints and bones, allowing the robot to walk, balance, and even kick a bowling ball. Different leg areas are designed with varying stiffness to match real elephant anatomy—for example, stiffer toes in the front and softer heels for shock absorption.
The research also demonstrates how programmable lattices can mimic a variety of joint movements, including sliding joints (foot bones), single-axis bending (knee), and dual-axis bending (toes). The trunk’s complex movement is made possible by dividing it into functional sections while maintaining smooth transitions.
Researchers note that this foam lattice design is lightweight, efficient, and ideal for motion in fluid environments. It also opens the door to integrating sensors into the structure, paving the way for more intelligent and adaptable robots.
The elephant robot created by the team uses only a single material, 3D printed with programmable lattices. It moves using motors and tendons, and thanks to its open structure, it’s fast to print, lighter in weight, and even capable of moving in water.
Inspired by how evolution shapes animals—like the flexibility of snakes or the strength of cheetahs—the team believes robots should also be tailored to their tasks. Unlike traditional multi-material approaches, their single-material lattice method simplifies production, lowers cost, and makes customization easier.
Design of the elephant robot. Image courtesy of EPFL.
This technology isn’t just for elephants. It could be used in:
The researchers also see future potential in adding sensors and smart systems into the lattice, making robots that are not only strong and adaptable, but also intelligent.
Their work proves that structure is just as powerful as material—and with the right design, a single substance can unlock a new generation of functional, animal-like robots.
*This article originally appeared on 3DPRINT.COM . Vanesa Listek is the original author of this piece.
In the chain of high-end manufacturing, CNC (Computer Numerical Control) machining is responsible for giving parts their geometric shapes and dimensional accuracy, while surface treatment determines the lifespan, functionality and reliability of the parts. Among various surface treatment processes, nickel plating has become one of the most commonly used post-processing techniques for CNC machined components due to its unique comprehensive properties – combining corrosion resistance, wear resistance, lubricity and excellent appearance.
Whether it is the precision valve bodies in the aerospace field, the aluminum alloy casings in consumer electronics, or the transmission components in the automotive industry, nickel plating plays an indispensable role.
BJ (Binder Jetting) is becoming a popular choice for mass-producing metal parts, with its biggest highlight being: no support structures needed at all.